Shaping the Future of
Transportation
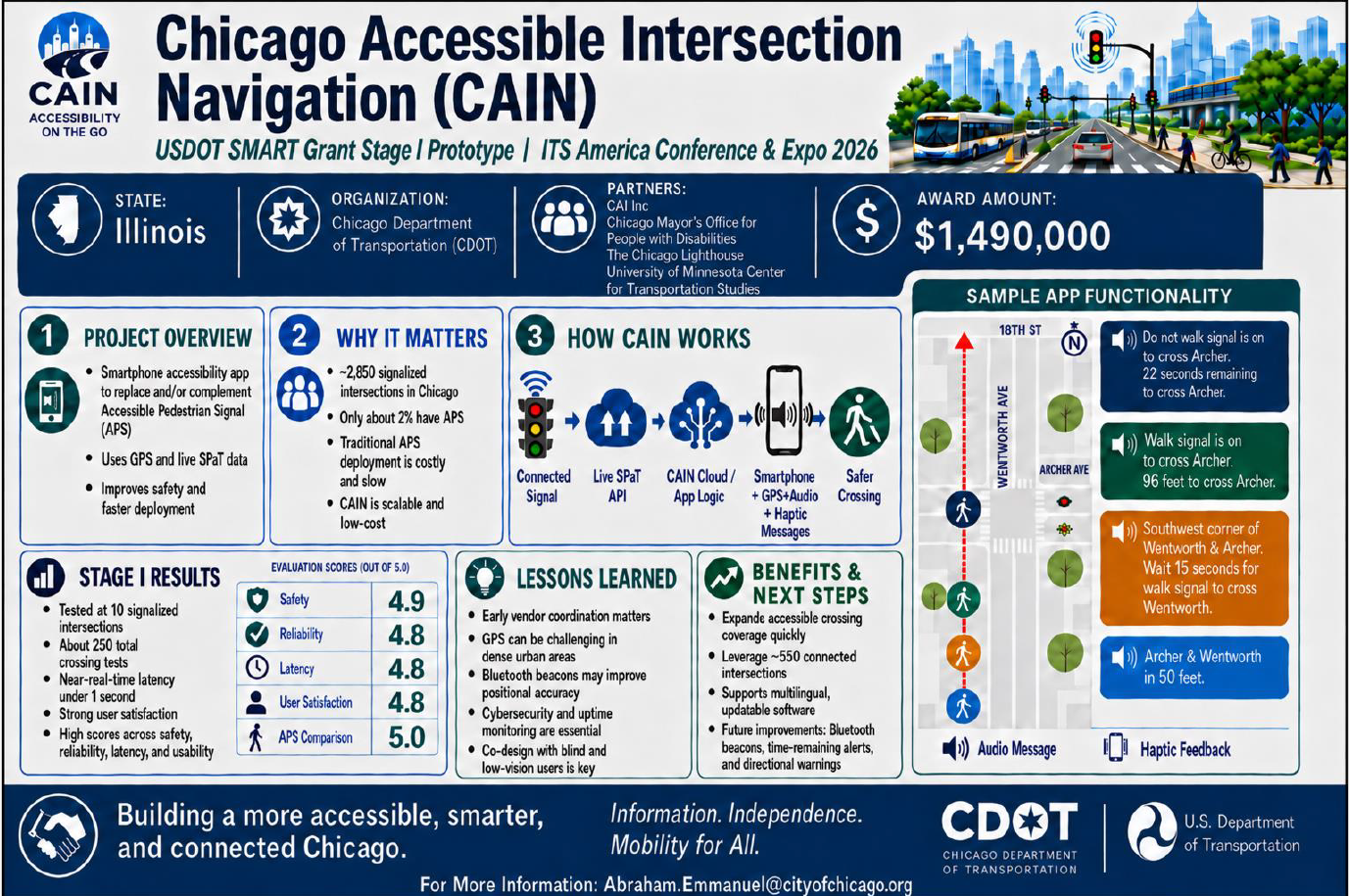
I'm an ITS Consultant at the Chicago Department of Transportation via Alrek Business Solutions, combining traffic engineering with AI to build smarter, safer mobility systems.
At UIUC's Department of Civil and Environmental Engineering, I developed trajectory planning algorithms using Deep Reinforcement Learning and Computer Vision, calibrated CAV control policies with genetic algorithms, and deployed ROS-based systems on physical autonomous vehicles at the Illinois Center for Transportation.
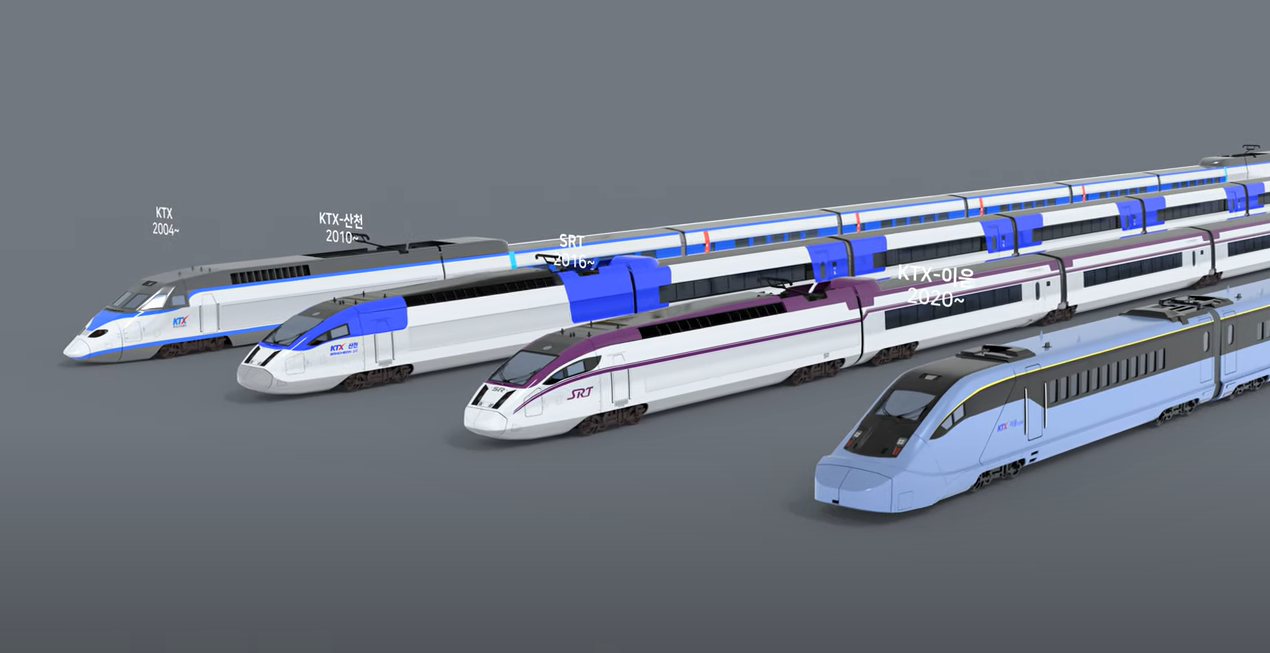
Recipient of the Charles E. DeLeuw Scholarship, I conducted a field study in South Korea analyzing KTX, SRT, GTX, and urban transit networks by translating insights into actionable proposals for U.S. High-Speed Rail.
📡ITS & Traffic Operations
🌆Smart City Infrastructure
🚌Bus Rapid Transit & Transit Signal Priority
🚆High-Speed Rail
🚗Autonomous Vehicles & CAV
🧠Deep Reinforcement Learning
👁️Computer Vision & LSTM
✈️Air Transportation Systems